| |
| �@�@�A)�H�c�[���{��ԃt���C�g�ڍ��@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ |
| �@�@�@�@�@�e�n�_�ł̏ڍא����@�i�P�j�`�i�V�j�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ |
| |
|
�@�@�@�i�P�j�����ݒ�
�@�@�@�@�@�Z�X�i�@�̏����ݒ�Ɠ��l�ɂ��Ė����@���
�@�@�@�@ �@�f�o�r��z�u���A���g�@���x�A���x������͂���
�@�@�@�@�@ ���� |

|
|

|
| |
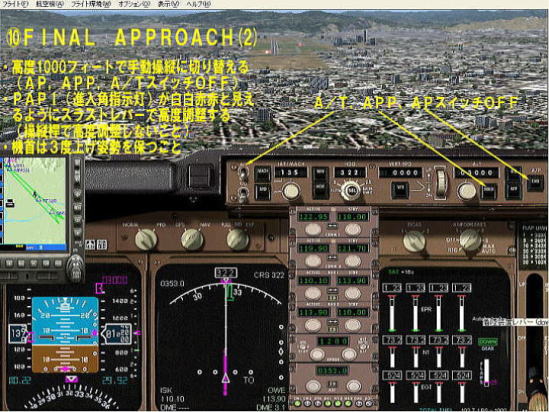
�@�@�@�@(2)�E����
�@�@�@�@�@�E�������c���u�X�C�b�`�n�m���O�̏�
�@�@�@�@�@�E������s�ɂȂ������_�ł`�o�X�C�b�`�n�m�ɂ���
�@�@�@�@�@�E�R�[�X�w�j�Ƃg�c�f�w�j�����ʂP�O�O�x�ŏd�Ȃ� |
 |
| �@�@�@�@�@�@�@ |
|
�@�@ �@�@�@�@
|
�@�@�@�@�@�@�@�i�R�j�؍X���u�n�q�C���^�[�Z�v�g
�@�@�@�@�@�@�@�@�E�g�r�h�w�j�������n�߂���g�c�f�����X��
�@�@�@�@�@�@�@�@ 100��202 �ɕς��Ă��� |
|
�@�@�@�@�@�@�@�i�S�j�؍X��VOR���O
�@�@�@�@�@�@�@�@�E�u�n�q�ʉߒ��O�̑��� |
 |
|
 |
| �@�@�@�@�@�@�@�@�@�@ |
|
�@�@�@�@�@�@�@�@�@�@�@�@�@ |
�@�@�@�@�@�@�i�T�j�؍X��VOR)����
�@�@�@�@�@�@�@�@�E�u�n�q�ʉߒn�_�ł̑���
�@�@�@�@�@�@�@�@�ETO/FROM�C���W�P�[�^����u������ |
|
�@�@�@�@�@�@�i�U�j�؍X��VOR�ʉ�
�@�@�@�@�@�@�@�@�E�u�n�q�ʉߌ�̑���
|
 |
|
 |
| �@�@�@�@�@�@�@ �@�@ |
|
�@�@�@�@�@�@�@�@�@�@ |
| |
|
|
�@�@�@�@ �@ �@�i�V�j���{��VOR��O
�@�@�@�@�@�@�@�@�E����I����̏�
�@�@�@�@�@�@�@�@�E�w�j���꒼���ƂȂ��Ĕ�s���Ă��� |
|
|
 |
|
|
| �@�@�@�@�@�@ �@�@ |
|
|
| |
|
|
| ���{��u�n�q�ȍ~�͓��l�ȕ��@�ő��삷�� |
|
|
| |
|
|
| �@�C)�@��a �h �r�[����`�ԃt���C�g�ڍ� |
|
|
| �@�@�@�e�n�_�ł̏ڍא����@�@�@�@�@�@�@�@�@�@�@ |
�@ �@�@�@�@�@�@�G��a�C���^�[�Z�N�V����
�@�@�@�@�@�@�@�@�EHSI�w�j�������͂��߂���NAV�X�C�b�`�n�m |
|
�@�@�@�@�@�@�@�@�@�@�H�����̐�
�@�@�@�@�@�@�@�@�@ �@�EAPP�X�C�b�`ON |

|
|
|
| |
|
|
�@�@�@�@�@�@�@�@�@�@�I FINALAPPROACH �@(1)
�@�@�@�@�@�@�@�@�@�@�@�E�~���J�n |
|
�@�@�@�@�@�@�@�IFINALAPPROACH�@�@(2)
�@�@�@�@�@�@�@�@�E�蓮���c�ɐ�ւ��� |
|
|
|
 |
| �@�@�@�@�@�@�@�@�@�@�@�@�@�@ |
|
�@�@�@�@�@�@�@�@�@ |
�@�@�@�@�@�@�@�@�@�@�@�J���@��
�@�@�@�@�@�@�@�@�@�@�@�@�E�@��グ�p�����ێ� |
|
|
 |
|
|
�@�@�@�@�@�@�@�X�N���[���V���b�g
| �@�@�@�@�@�@�@�A�@�@�H�c��`�R�S�q�����H |
 |
��������҂W�����{
|
 |
�@�@���Ȃ��猩���R�S�q�����H
�@�@�@ |
| �@�@�@�@�@�@�@�C�@�@���@�� |
 |
�R�S�q�����H�𗣗�
|
| �@�@�@�@�@�@�@�E�@�@������E���� |
 |
������O�ʼnE����
|
 |
| �@���Ȃ��猩�邨������ |
| |
| �@�@�@�@�@�@�@�G�@�@�㏸�� |
 |
| �ቺ�ɓ����f�B�Y�j�[�����h�������� |
| |
 |
| ��O�͐�t�s���A���̌������͑����m�� |
| |
| �@�@�@�@�@�@�@�I�@�@�؍X�ÃC���^�[�Z�v�g�n�_ |
 |
| �E����J�n |
| |
 |
| ���t�H�ƒn�т������� |
| |
| �@ �@�@�@�@�@�@�J�@�@�؍X�Âu�n�q�ʉߌ�E���� |
 |
| ��O�͎O�Y�����A�E���͉��l�A�E��ɂ͕x�m�R�������� |
| |
|
 |
�@���Ȃ���͎O�Y�����̐�[�Ƒ哇��������
�@�@�@�@ |
| �@�@�L�@�@���{��u�n�q�Ɍ����� |
 |
���{��u�n�q�Ɍ�����
|
 |
�@���Ȃ��猩�����͘p
��O�ɍ]�m���A��Ɉɓ������A�E��ɂ͕x�m�R��������
|
| �@�@�N�@�@�ɓ�������]�� |
 |
�����̔������ɓ������A�x�m�R�ƈ��m��������
�ɓ������̌��������x�͘p
|
 |
�ɓ������ƈ��m��
��O�̏����Ȕ������^�ߔ���
|
| �@�@�@�P�@�@�l����� |
 |
�l�����x�m�R�ƈɓ�������]��
|
 |
�l�����l���ƈ���������]�ށB�����̐�[���ɗnjΖ�
|
| �@�@�R�@�@�͘a�u�n�q�i�m��������[�j��� |
 |
���̎s�X�n�͏���s�A���̐�͕z���R�n
|
|
�@�@�@�T�@�@��a�C���^�[�Z�N�V�����i�ޗnj���a�j
 |
��a�h�r��猩���a��R��
�E�������p�A�������I�ɐ����A���ʂ̓����W�H��
|
| �@�@�@�V�@�@�g���� |
 |
�g������s�X�n�Ƒ��p��]��
|
 |
���͋����R�n�A����������R�n�A���̐�͑��s�X�n�B�E�[���ޗǎs
|
| �@�@ �X�@�@�����̐� |
 |
���x3000�t�B�[�g�A�ْ��������܂�
���[�Ɍ�����̂͑���i�V��t�͌����Ȃ��j
|
 |
���s�X�n���A�^���ʂ����ɒO��`
|
| �@ �@�Z�@�@FINAL APPROACH |
 |
�s�X�n�̐^����R�x�@��グ�p���ō~��
|
 |
|
|
| |
| �@�@�@�@�@�ł��ْ������� |
| �@ �@�@�@�@�@�@�@�\�@�@���@�� |
| �@�@�@�@�@�@�@�@�@�@�@�@�@�������O���璅���܂ł̎ʐ^�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ |
| |
 |
|
 |
|
| |
�@�@�@�@�P�����H�̐��ʂ��ێ�����
�@�@�@�@�@���x�̔������̓X���X�g���o�[�ōs�� |
|
�@�@�@�@�Q�D���x140�m�b�g���ێ��A�@��͂R�x
�@�@�@�@�@�@�グ�̎p����ۂ� |
|
| |
|
|
|
|
| |
 |
|
 |
|
| |
�@�@�@�@�R�D�X���X�g���o�[���A�C�h���ɖ߂� |
|
�@�@�@�@�S�D��ւ��璅�n���� |
|
| |
|
|
|
|
| |
 |
|
 |
|
| |
�@�@�@�T�D��ւ��璅�n�B�^�C�����牌���o�Ă���
|
|
�@�@�@�U�D�X�|�C���[�𗧂āA�O�ւ����n������
�@�@�@�@�@�t���˂�������
|
|
| |
|
|
|
|
| |
 |
|
 |
|
| |
�@�@�@�@�@�V�D�X�|�C���[�Ƌt���˂��쓮���Ă��� |
|
�@�@�@�@�@�@�W�D���ɒO��`�ɖ������� |
|
| |
|
| |
 |
| |